





朝鲜亲华派,历史脉络与现代政治解读
本文探讨了朝鲜亲华派的历史脉络与现代解读,涉及政治领域。文章介绍了朝鲜亲华派的形成背景、发展历程以及现代影响,分析了其在不同历史时期的角色和影响。在当前形势下,对于理解朝鲜政策走向和地区关系具有重要意义。摘要字数控制...

手机质量排行榜揭秘,品牌优劣与用户体验深度探讨
摘要:本文关注手机质量排行榜,深入探讨了各大品牌的优劣势以及用户体验。通过对比不同品牌手机的特点、性能、价格等方面,结合用户反馈和实际使用感受,对各大品牌进行了全面评估。文章旨在为消费者提供有价值的参考,帮助他们在购...
石破天惊,内涵深度解析与启示探讨
摘要:石破天惊这一表达,寓意着一种震撼人心的力量和深远影响。它内涵丰富,启示着人们在面对重大事件或决定时,需要有勇气和决心去突破常规,迎接挑战。它也提醒我们,在追求创新和突破的过程中,要深入理解事物的本质,洞察其深层...
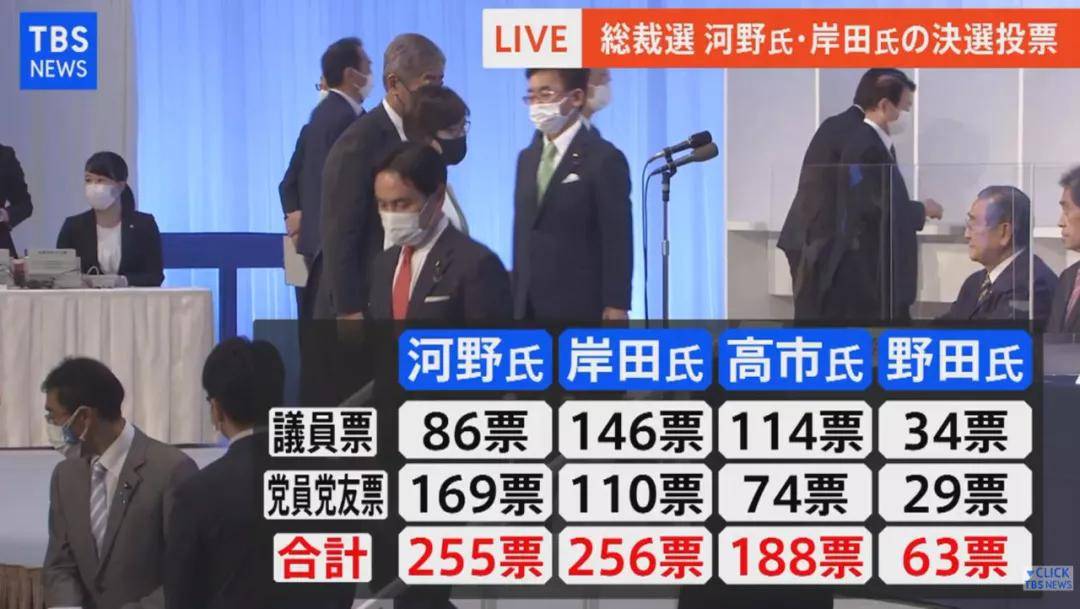
高市早苗的竞选演讲,勇气、热情与未来展望
高市早苗的竞选演讲展现了勇气与热情,同时承诺为未来的发展和进步不懈努力。演讲中,她强调了决心、毅力和对未来的坚定信念,呼吁听众共同为实现美好愿景而奋斗。她的演讲充满感染力,展现了领导者的潜力与担当,激励着人们共同迈向...

广东车祸死亡赔偿标准解析
广东车祸死亡赔偿标准详解:包括丧葬费、死亡赔偿金、被扶养人生活费等。具体标准根据死者年龄、收入等因素有所不同。赔偿流程包括事故认定、协商或调解、申请赔偿等步骤。赔偿金额的计算涉及多个因素,如死者收入状况、家庭状况等。...

垃圾堆里发现女尸,一起未解的神秘死亡案件剖析
垃圾堆中发现女尸,一起令人震惊的未解之谜。警方接到报案后立即展开调查,通过现场勘查和线索搜集,对这起案件进行深入剖析。目前案件的具体细节和动机尚不清楚,警方正在全力追查相关嫌疑人,并呼吁目击者和知情者提供线索,以尽快...
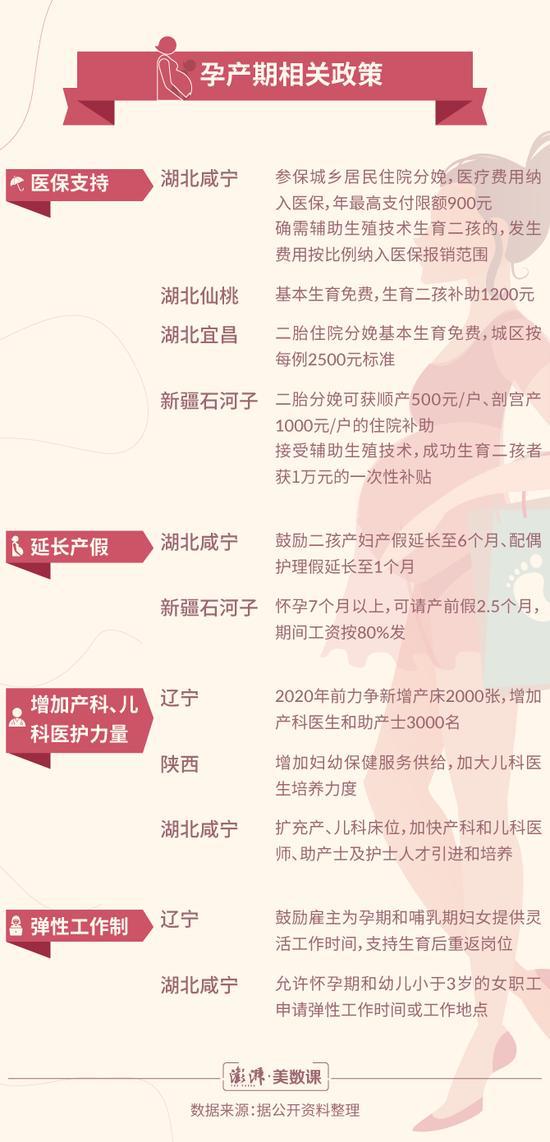
江西生育津贴领取规定全面解析
本文介绍了江西省的生育津贴领取规定。内容包括生育津贴的发放对象、发放标准、申请条件及流程等。江西省为鼓励生育,制定了一系列优惠政策,符合条件的家庭可领取生育津贴。本文旨在帮助广大市民了解并顺利申请生育津贴,享受政策带...
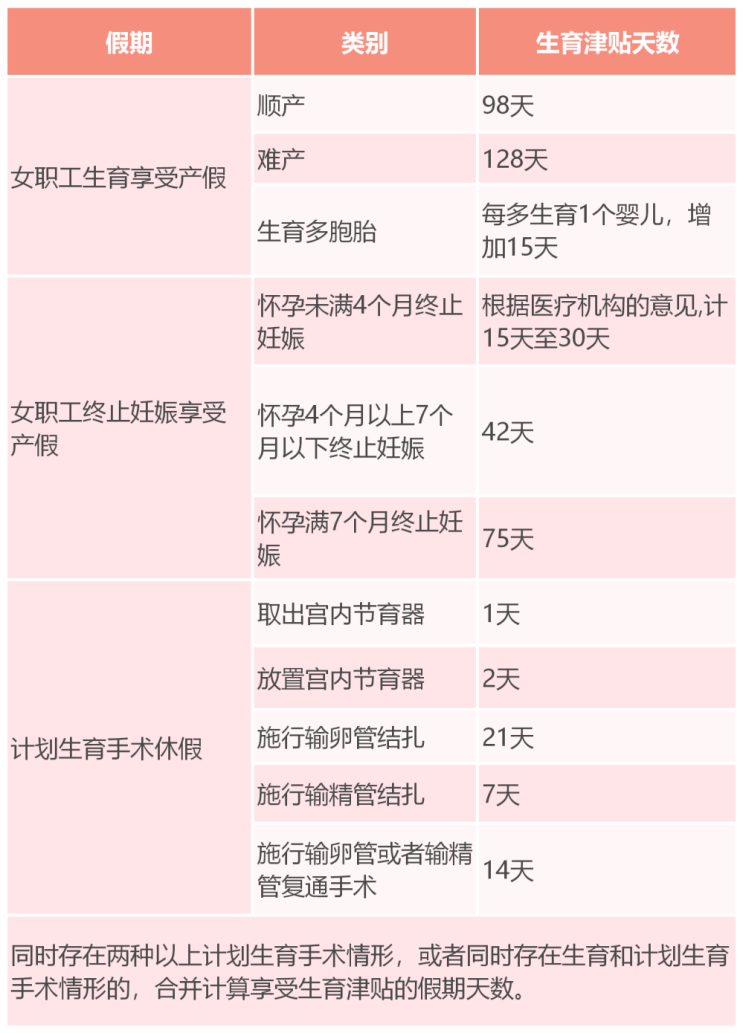
大学生生育津贴申领攻略,生育津贴申请流程与条件解析
大学生生育津贴的领取流程如下:大学生需确认自己符合当地生育政策规定的条件。在生育后携带相关证明材料,如身份证、学生证、结婚证、医院出具的生育证明等,到当地社保经办机构办理生育登记。经过审核通过后,即可领取生育津贴。具...

夺命飞行女教练,勇气、技术与领航之力
摘要:夺命飞行女教练以其非凡的勇气、卓越的技术和出色的领导力著称。她不仅在飞行领域展现出卓越的才能,更在关键时刻展现出冷静的判断和坚定的决策力。她鼓舞着更多女性追求梦想,挑战传统性别观念,成为激励后代的榜样。她的故事...

古老智慧与宇宙之谜,外星视角下的唯一人类探索
外星人观点称老子是唯一具备深度智慧的人类,他探寻古老的智慧并揭开宇宙之谜。老子思想深邃,涵盖宇宙观、人生观等,或许与外星智慧有共通之处。这一观点引人深思,探讨人类在宇宙中的地位及智慧的普遍性。通过探寻老子智慧,可进一...