




摘要:本文介绍了机器人的转弯机制与操作指南。通过图解的方式,详细解释了机器人如何转弯。读者可以了解机器人的转弯原理,包括转向传感器、电机控制等关键技术。提供了操作指南,帮助用户正确操作机器人进行转弯。本文旨在帮助读者更好地理解和运用机器人的转弯功能。
本文目录导读:
随着科技的飞速发展,机器人技术已经广泛应用于各个领域,从工业生产线到日常生活,从太空探索到灾难救援,机器人的身影随处可见,对于机器人来说,转弯是一个基本且重要的动作,本文将详细介绍机器人如何转弯,通过图解的方式帮助读者更好地理解。
机器人的转弯机制
机器人的转弯机制主要依赖于其运动控制系统和伺服系统,机器人的轮子、关节等部件通过伺服系统驱动,实现前进、后退、左右转动等动作,机器人的运动控制系统则负责协调这些动作,实现机器人的精确转弯。
机器人转弯的方式
1、轮子转向
轮式机器人的转弯主要依赖于轮子的转向,通过改变前轮或后轮的方向,机器人可以实现转弯,让前轮向左转,后轮保持直行,机器人就会以前轮为中心进行转弯。
2、关节转动
对于具有关节的机器人,如机械臂等,转弯则依赖于关节的转动,通过调整关节的角度,机器人可以沿着不同的方向移动或转动。
机器人转弯图解
为了更好地理解机器人如何转弯,我们将通过图解的方式进行详细解释。
1、轮子转向转弯图解
(请在此处插入机器人轮子转向转弯的图解)
如上图所示,机器人在转弯时,前轮向左转,后轮保持直行,这样,机器人就会以前轮为中心进行转弯,通过调整轮子的速度和方向,机器人可以实现不同半径的转弯。
2、关节转动转弯图解
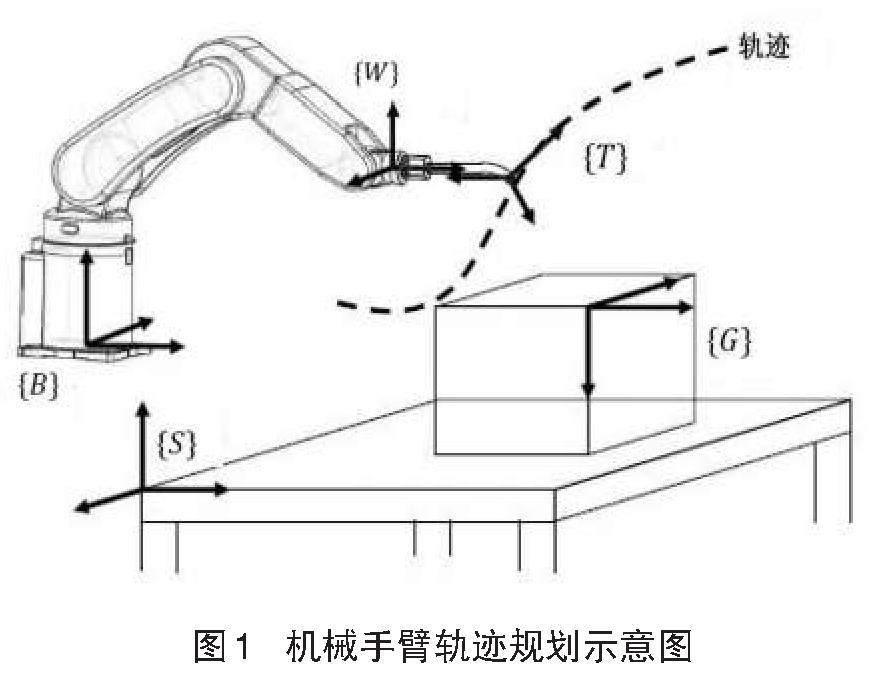
(请在此处插入机器人关节转动转弯的图解)
对于具有关节的机器人,如机械臂等,转弯则依赖于关节的转动,如上图所示,机器人在转弯时,可以通过调整关节1和关节2的角度,使机械臂沿着不同的方向移动或转动。
机器人转弯的操作步骤
1、确定转弯方向:根据任务需求,确定机器人需要向哪个方向转弯。
2、调整轮子或关节:根据机器人的类型和结构,通过轮子转向或关节转动的方式实现转弯。
3、控制速度和角度:在转弯过程中,需要控制机器人的速度和转动角度,以确保机器人能够按照预定路径进行移动。
4、监测和调整:在转弯过程中,需要实时监测机器人的状态,并根据实际情况进行调整,以确保机器人能够顺利完成任务。
注意事项
1、在进行机器人转弯操作时,需要注意机器人的运动范围和灵活性,避免碰撞和卡住。
2、不同类型的机器人具有不同的转弯机制和操作方式,需要根据实际情况进行选择。

3、在进行复杂任务时,需要充分考虑机器人的运动规划和路径规划,以确保机器人能够按照预定路径进行移动。
4、机器人的转弯速度和质量受到多种因素的影响,如轮子或关节的性能、机器人的负载等,需要进行合理的调整和优化。
本文详细介绍了机器人如何转弯,包括机器人的转弯机制、转弯方式、操作步骤以及注意事项,通过图解的方式,帮助读者更好地理解机器人的转弯过程,希望本文能够对读者了解和使用机器人有所帮助,随着科技的不断发展,机器人将在更多领域得到应用,我们将有更多的机会接触到机器人技术,了解机器人的基本操作和原理,将有助于我们更好地利用机器人技术,提高生产效率和生活质量。