





摘要:本文探讨了足式机器人的关键技术,包括其机械结构、运动规划与控制、感知与导航、能源管理等方面。足式机器人需具备高度灵活性和稳定性,以实现复杂环境下的高效运动。文章还讨论了机器人在运动过程中的感知能力,以及能源效率问题。这些关键技术的突破对于足式机器人的进一步发展具有重要意义。
本文目录导读:
随着科技的飞速发展,足式机器人技术已成为现代机器人领域中的研究热点,足式机器人以其高度灵活性、适应性和强大的地形适应能力,广泛应用于军事、救援、勘探、农业等领域,本文将重点探讨足式机器人的关键技术,包括机械结构、运动控制、感知与导航等方面。
机械结构
足式机器人的机械结构是其核心技术之一,主要包括腿部结构、驱动系统和机身结构等,腿部结构是实现足式机器人运动的关键,要求具有较高的灵活性和稳定性,驱动系统为腿部结构提供动力,通常采用电机、液压或气压等驱动方式,机身结构则负责承载各种传感器、控制器和执行器等设备。
运动控制
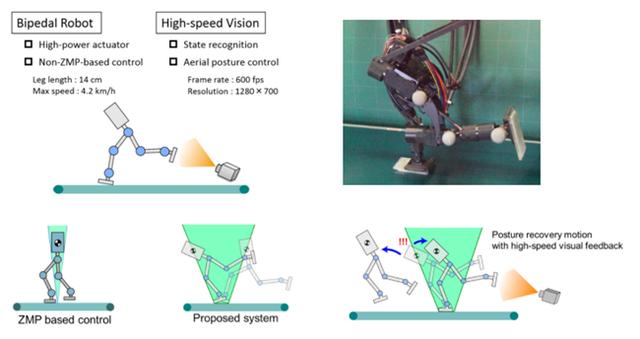
运动控制是足式机器人的核心,涉及到机器人的运动规划、步态规划、稳定性控制等方面,运动规划主要解决机器人如何达到目标位置的问题,包括路径规划、轨迹规划等,步态规划则关注机器人行走的步序和步长,以确保机器人在不同地形下的稳定性,稳定性控制是足式机器人运动控制中的关键问题,涉及到机器人的动力学模型、姿态控制等方面。
感知与导航
感知与导航技术是足式机器人实现自主运动的关键,感知技术包括视觉、红外、超声等传感器技术,用于获取环境信息,导航技术则包括路径规划、地图构建等技术,以实现机器人的自主导航,通过这些技术,足式机器人能够感知周围环境,并根据环境信息调整行走路径,以实现自主运动和避障。
关键技术研究现状
目前,足式机器人的关键技术研究已取得显著进展,在机械结构方面,研究者们不断尝试新的材料和结构设计,以提高机器人的承载能力和运动性能,在运动控制方面,随着计算机技术和控制理论的发展,足式机器人的运动控制精度和稳定性不断提高,在感知与导航方面,随着传感器技术和人工智能技术的发展,足式机器人的环境感知和自主导航能力不断增强。

关键技术应用与挑战
足式机器人的关键技术在实际应用中发挥着重要作用,在军事领域,足式机器人可以执行侦察、巡逻等任务;在救援领域,足式机器人可以进入灾区进行搜救;在农业领域,足式机器人可以进行农田巡视和植物护理等,足式机器人在实际应用中仍面临许多挑战,如复杂环境下的稳定性问题、能源问题、成本问题等。
未来发展趋势
足式机器人的关键技术将朝着更高性能、更低成本、更强适应性的方向发展,随着新材料、新技术的发展,足式机器人的机械结构将更加优化,运动控制将更加精准,感知与导航能力将更加强大,随着人工智能技术的发展,足式机器人将实现更加智能的自主运动和决策。
足式机器人的关键技术是实现其高度灵活性、适应性和强大地形适应能力的基础,随着科技的发展,足式机器人的关键技术将不断取得新的突破,为军事、救援、勘探、农业等领域提供更多可能性,足式机器人在实际应用中仍面临许多挑战,需要研究者们不断探索和创新。
